Get Started#
This section provides instructions for ingesting both ROS 1 and ROS 2 logs. Roboto supports the following log file formats:
ROS 1
bagfiles.ROS 2
mcapfiles (ROS 2 Iron Irwini and later)ROS 2
db3(SQLite) files.
Create a dataset#
Create a new dataset by clicking on the + icon in the top navigation bar.
Once created, you will be taken to the dataset. Upload your log (.bag, .mcap or .db3) by dragging it into the dataset. Note, if you’re uploading a db3 file, you will also need to upload the corresponding metadata.yaml file.
Ingest log#
After uploading a log, Roboto will automatically trigger the ingestion process. A blue spinner next to the Actions tab indicates that ingestion is in progress. This may take a few seconds to appear if Roboto is under heavy load.
Note
If you don’t see the spinner appear, you may not have a ROS ingestion trigger configured in your account. Follow the steps at ROS Triggers to add one.
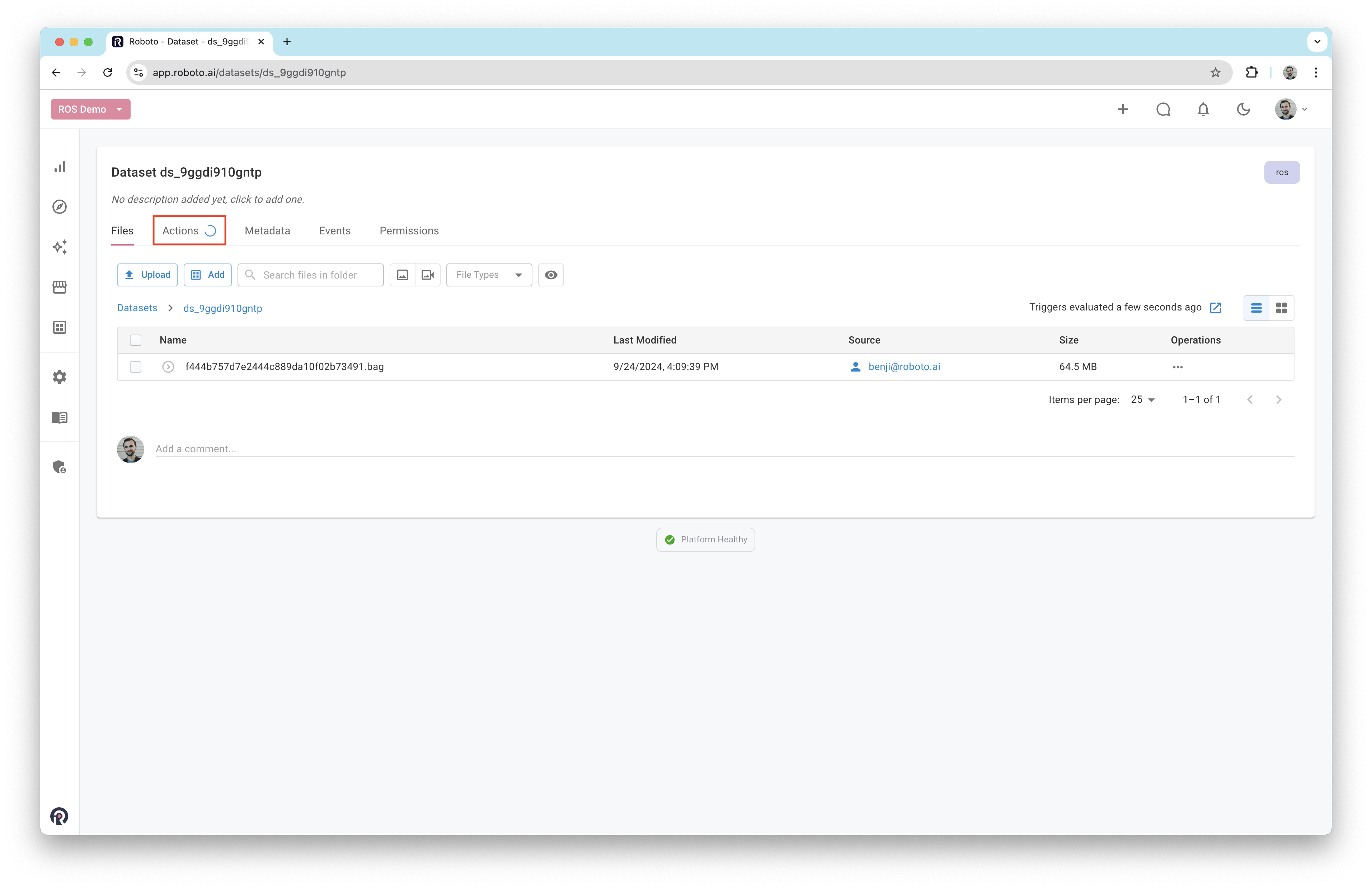
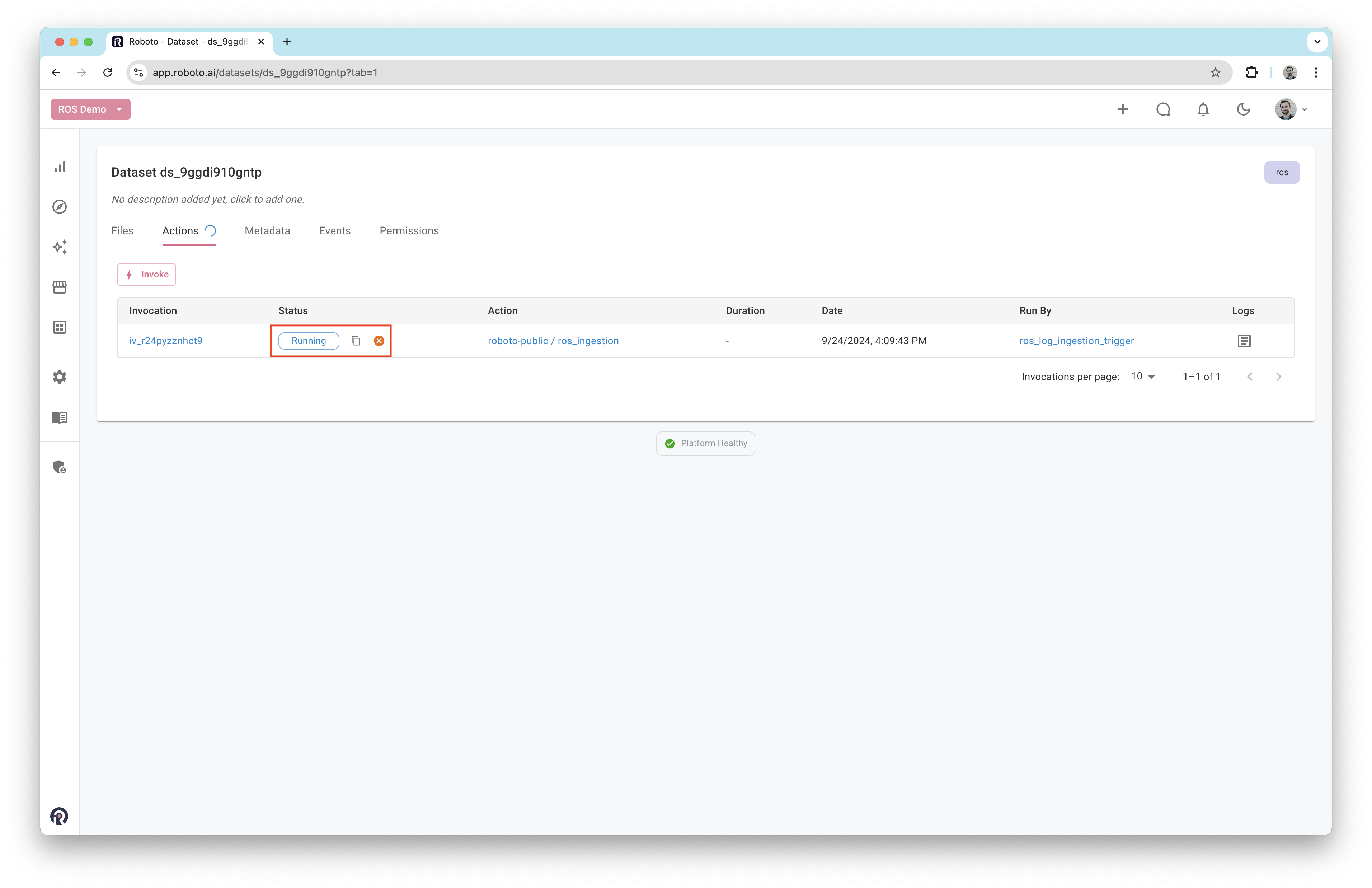
To monitor the process, click on the Actions tab.
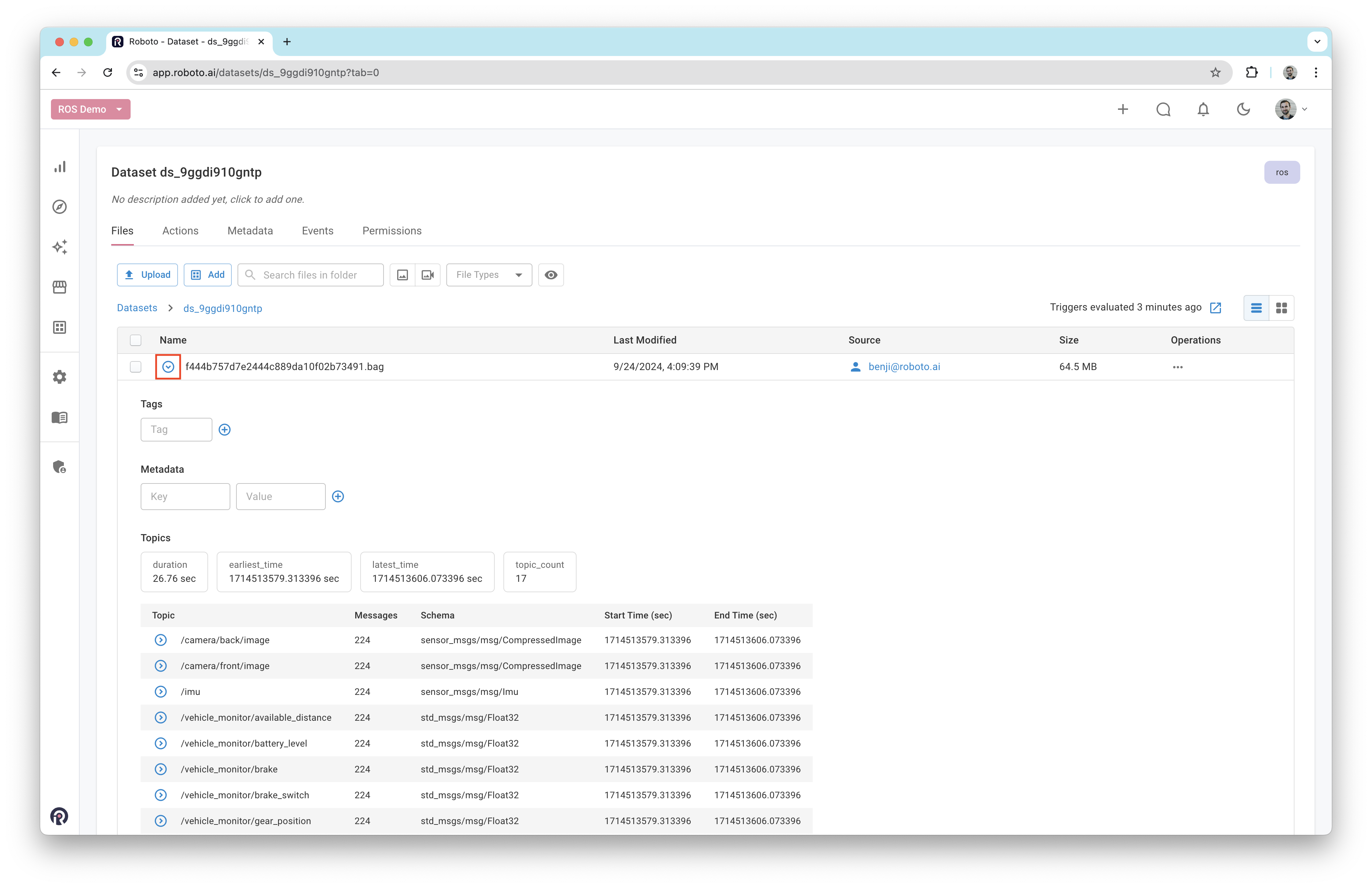
View topics, tags and metadata#
After the ingestion process is complete, you can view the metadata, tags, and topics for the log by clicking on the blue chevron next to the file name. Additionally, tags and metadata can be manually added if needed.
Read the next section to learn how to visualize log data in Roboto.