Search Data#
This section illustrates how to search ROS logs using RoboQL, Roboto’s query language. RoboQL enables filtering ROS log files based on metadata, tags, and statistics derived from topic data.
For the examples below, we uploaded a couple of hundred .bag files from the nuScenes dataset into an example Roboto account. The data includes logs from various driving scenes in Singapore and Boston.
Query with metadata and tags#
Every dataset in this example has automatically been tagged with the city where the data was collected and the sys_version that was used to record the data. Refer to creating your own action to learn how to automatically tag your own data.
Using RoboQL, you can query files based on metadata and tags. To highlight this, we will locate all drives with sys_version=1 that were recorded in boston:
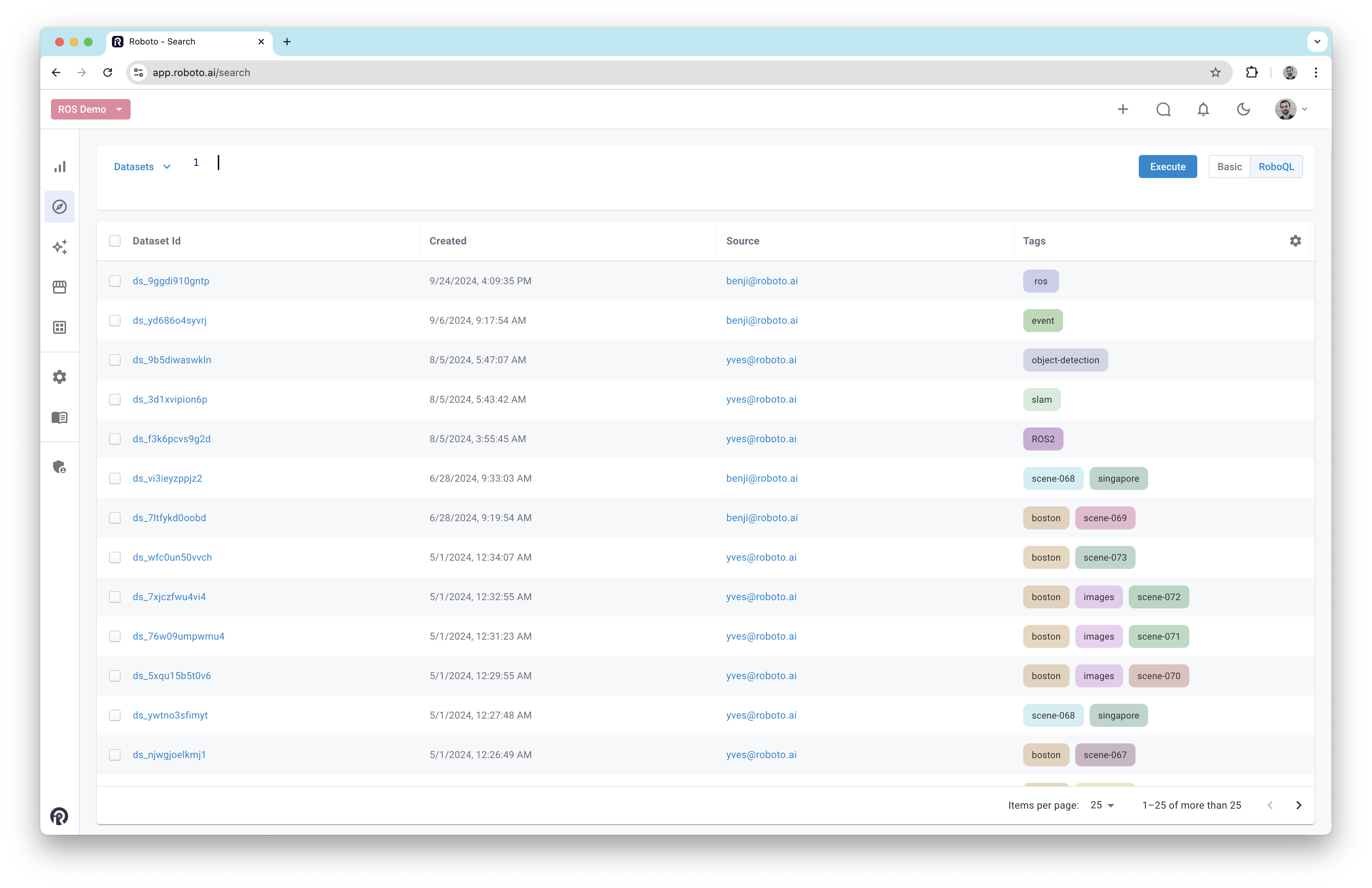
First, we navigate to the Search page in Roboto.
We leave Datasets as the query target on the left side of the search bar, and then select the RoboQL toggle on the right side:
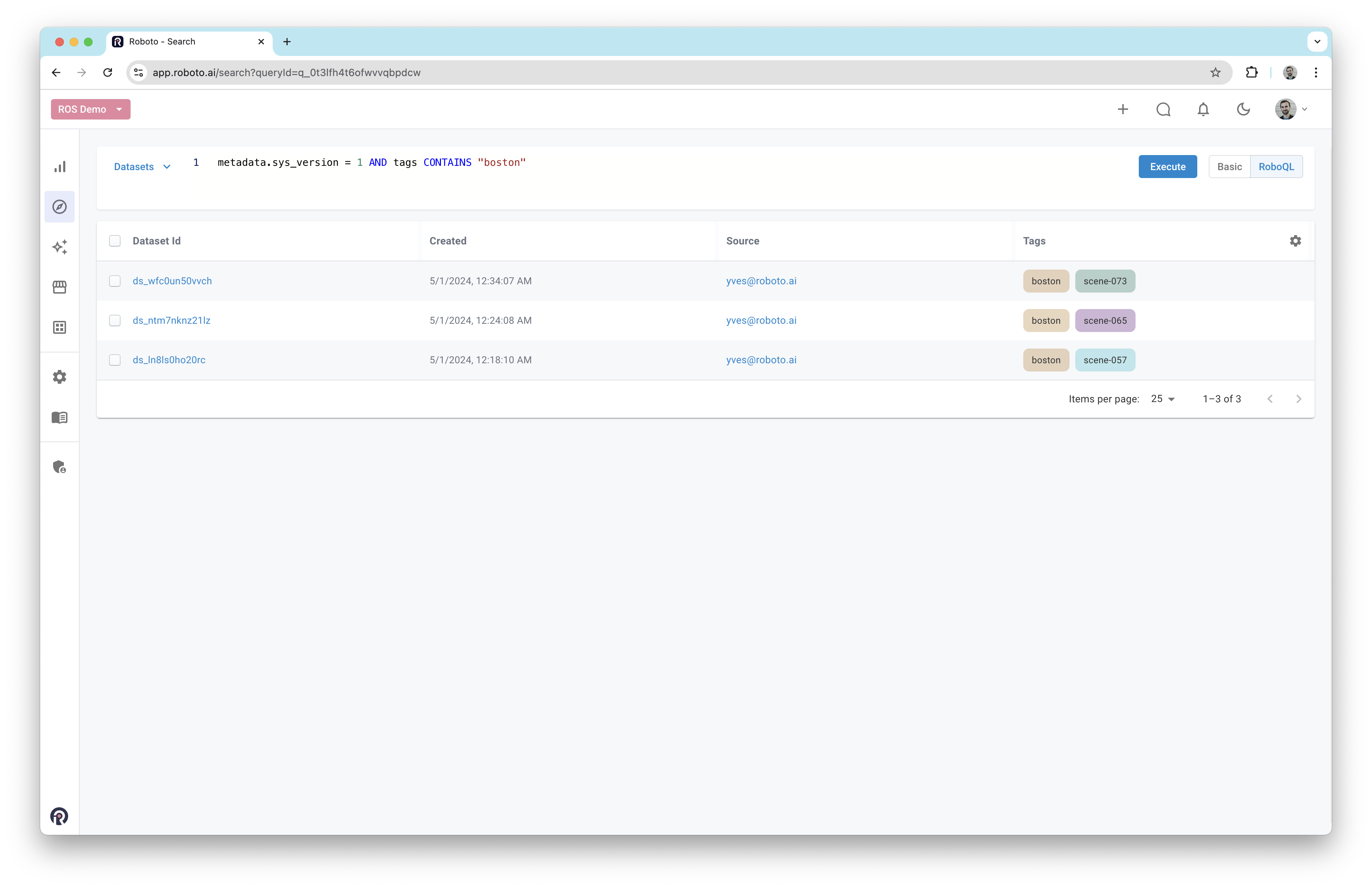
We can then enter the following query in the search box:
metadata.sys_version = 1 AND tags CONTAINS "boston"
Review the query results:
Query with topic data#
In addition to metadata and tags, RoboQL enables you to query logs based on statistics derived from topic data. For example, you can search for drive logs within a specific speed range or at a particular battery level.
By default, Roboto calculates the following statistics for each message path in a topic: min, max, mean, and median. For boolean fields within message paths, Roboto also calculates true_count (the number of true values) and false_count (the number of false values).
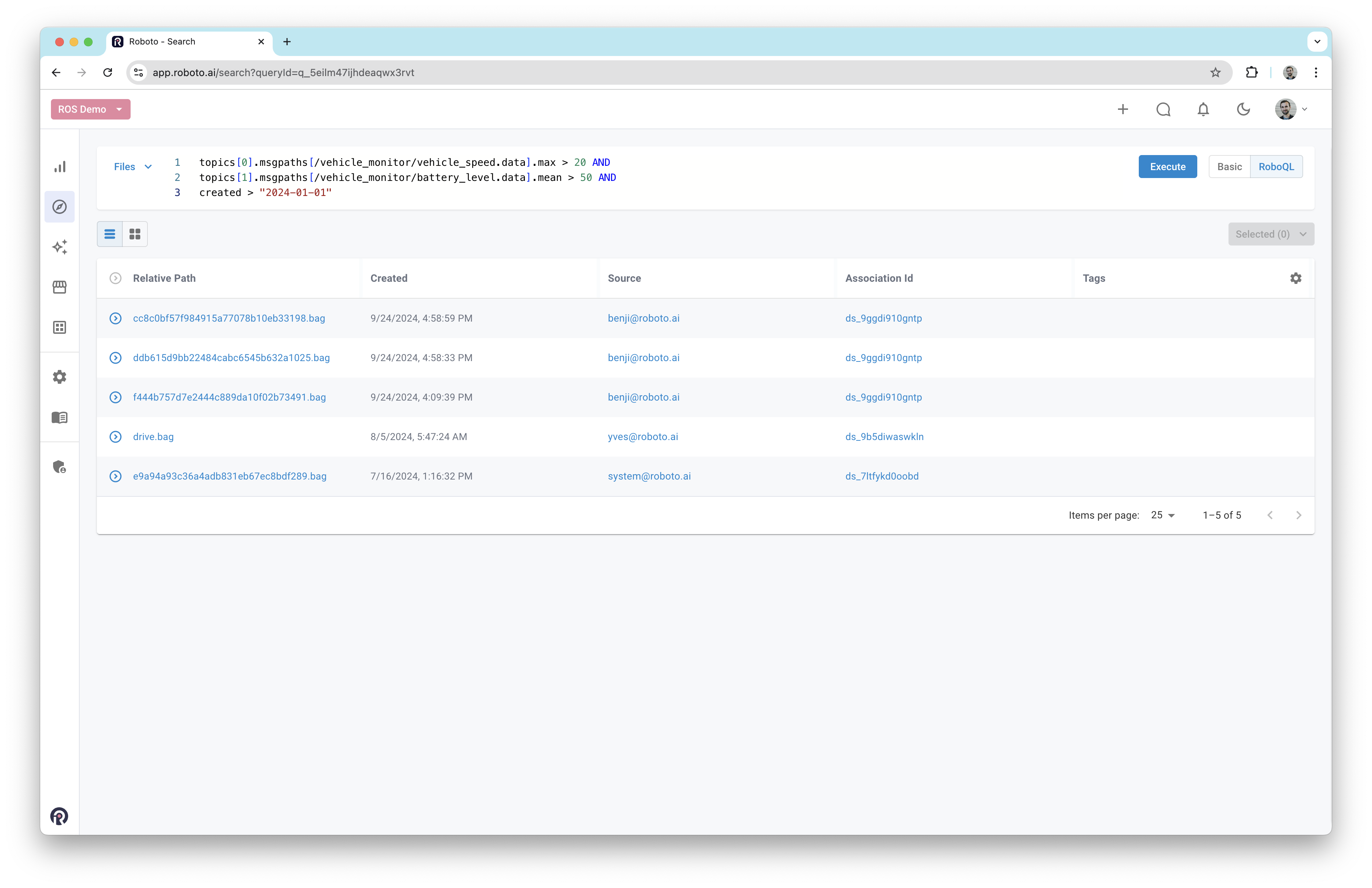
For example, to search for all logs in 2024 where the maximum vehicle speed was above
20 mphand the average battery level was above50%, we can use the following query:topics[0].msgpaths[/vehicle_monitor/vehicle_speed.data].max > 20 AND topics[1].msgpaths[/vehicle_monitor/battery_level.data].mean > 50 AND created > "2024-01-01"
Review the query results: